原理
字数
330 字
阅读时间
2 分钟
NOTE
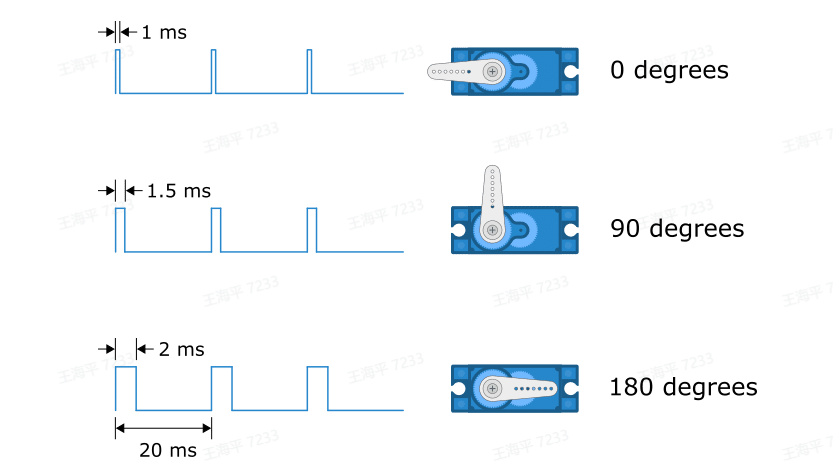
控制舵机的主要原理是 通过向舵机的信号线发送电平时序信号来控制舵机的转动位置
系列舵机

平常使用的舵机是 SG 90,在"机械臂"中,即用到了 SG 90,也用到了 MG 996 R 以及 MG 90 S
SG90与MG996R的区别:
SG 90:
MG996R与MG90S:
0.5ms--------------0度; 2.5% (0.5ms高电平+19.5低电平)
1.0ms------------45度; 5.0% (1.0ms高电平+19.0低电平)
1.5ms------------90度; 7.5% (1.5ms高电平+18.5低电平)
2.0ms-----------135度;10% (2.0ms高电平+18.0低电平)
2.5ms-----------180度;12.5%(2.5ms高电平+17.5低电平)
舵机的控制周期通常为20毫秒、50Hz的频率,但是许多舵机在40至200 Hz的范围内都能正常工作。
定位
在安装过程中,需要首先对舵机进行定位,其实无论是什么项目,在用到舵机的时候,第一步一定是定位
下面是将舵机控制到 0 度的代码,针对的是 MG 996 R 型号
cpp
#include <Arduino.h>
#include <ESP32Servo.h>
#define servo1Pin 23
Servo servo1;
void setup() {
servo1.setPeriodHertz(50);
servo1.attach(servo1Pin, 500, 2500);
servo1.write(90);
}
void loop(){
}其他的初始化,只需要更改 write () 函数中的值即可。
 王海平
王海平